General Info
Surgeries, made by means of stereotactic head-frames attached to skull need planning procedure which is able to guarantee high accuracy. Our CranioPass system, resulted from many years of work, represents universal, novel planning prototype which is adaptable to several arc-based head-frames. Number of tasks have been solved during development which, on the one hand, simplify the adaptation of software architecture, on the other hand, support for control of planning steps with interactive planning solutions and error estimation by means of using different feedbacks.
Generally accepted that neurosurgical interventions supported by head frames attached on skull are clinically more reliable because of mechanical fixation and stability of tools and the high precision due to it. CranioPass planning platform is able to integrate the computations for several arc-based stereotactic frames (Riechert-Mundinger and MHT, Freiburg, Germany as well as Leksell, CRW, Elekta Inc. Sweden). The connection between the 3D space of stereotactic frames and the diagnostic environment (3D volume of CT) can be calculated by means of rigid reference system (marker plates).
This document summarizes the authors’ concept and conditions of efficient use. It introduces user to tasks based on clinical experiences which can be planned preoperatively and verified postoperatively by CranioPass system.
Compact 3D Architecture
Software structure of CranioPass is suitable for displaying brain target areas on multimodality (fusioned) diagnostic background and transforming targets into stereotactic space of different arc-based frames. The planning platform is strictly 3D based and easily adaptable to different stereotactic frames. The planning steps are organized into modules and include error estimation with feedback visualization of user actions. During surgical planning the software projects the target coordinates into different 3D spaces. For these projections a reference space (usually 3D space of CT volume) is selected. Graphic planning, target selection are done in this reference space and the coordinates are transformed into fusion diagnostic volume (usually MR), the 3D space of reconstructed surface, patient own anatomical space (AC-PC-Falx) and stereotactic space of head-frames of different type. This procedure permits backward representation (in both directions, not only from the reference but from the derived spaces to reference, can be projected). This way the error estimation and the comparison of target coordinates with archived data can be simplified.
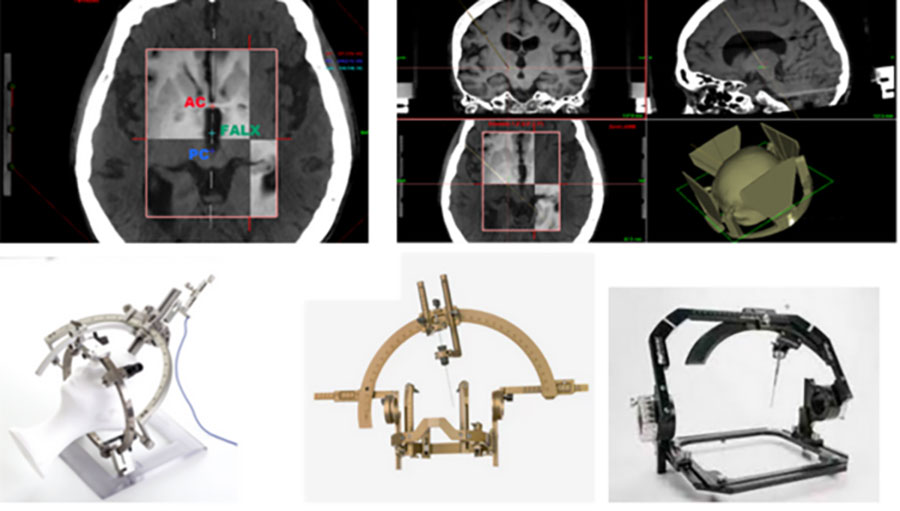
Image 1 Transparent graphic interface (on CT-MR fusioned background) is used for generic approach of surgical planning with head frames (several types of frames) and to improve reliability of planning. Upper row: CT-MR diagnostic space and patient’s anatomic space, relationship between the resampled diagnostic sequences and the diagnostic space containing surface reconstruction. Lower row: adapted calculations (for stereotactic space reconstruction in CT reference) can be used to get the parameter settings of different head frames (from left: Riechert-Mundinger and MHT, Leksell as well as CRW stereotactic frames).
Installing Software, Hardware Needs
Large diagnostic data sequences (volumetric models of reference and fusion images and surface reconstructed models) can be handled with time consuming, complex computations. These can be different statistically controlled fusion algorithms, 3D resampling, interpolating computations and surface reconstructions performed on large size voxel arrays. The solution of these tasks demands high power hardware architecture on both desktop and laptop computers. Preferred configuration could be:
- Laptop, portable (CPU: CORE i7, GPU NVidia GEForce 650 or better, RAM 8GB or more, OS: Windows 10, 11 USB2 or 3);
Installation of planning software could be only on designated machine and usage limited to that with appropriate built in protection.
CranioPass CranioPassCranioPassCranioPass
CranioPassCranioPassCranioPass
CranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPassCranioPass